





Windows
| 环境 | 版本 |
|---|---|
| 操作系统 | Windows 11 |
| VS build tool | 2017版 |
| python | 3.7.4、3.8.5 |
| mujoco | 150、210 |
| mujoco-py | 150版1.50.1.0,210版2.1.2.14 |
- 去下载
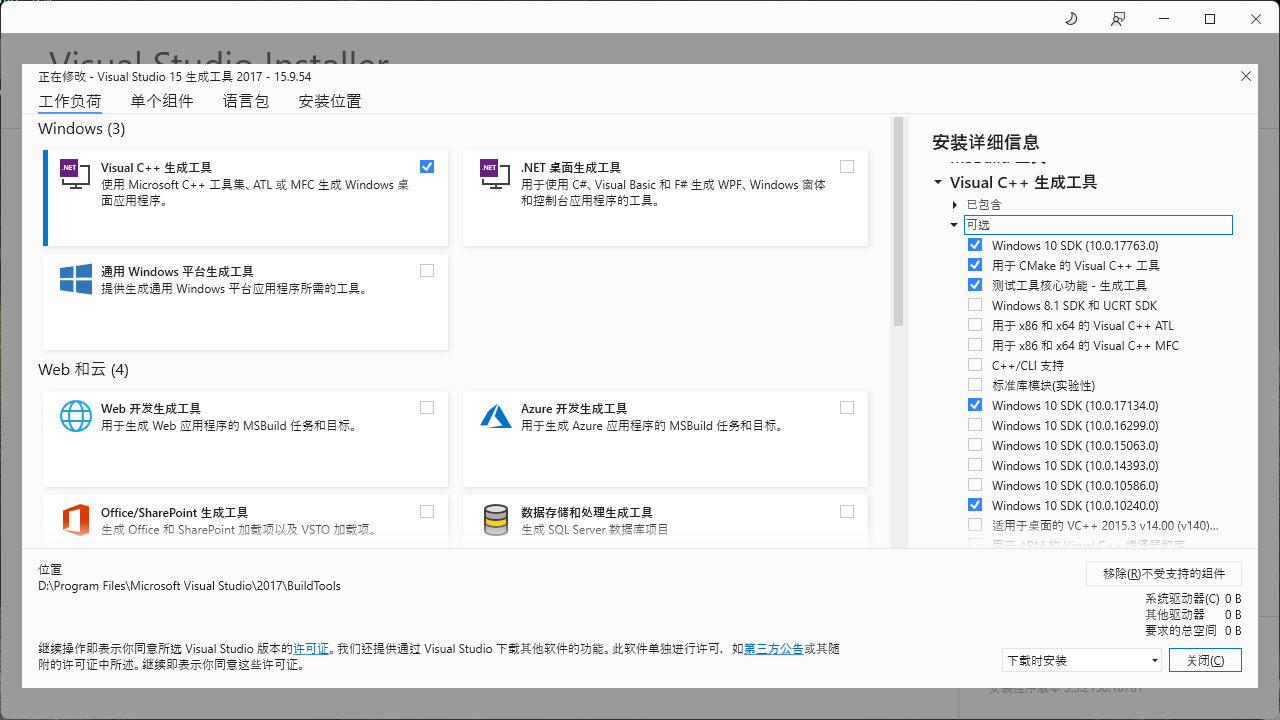
Build Tools for Visual Studio 2017 (version 15.9),进去安装win10的三个sdk以及其他生成工具,如下图。
- 之后去下载mujoco环境,150和210都可,放入
C:\Users\xxx\.mujoco\目录下,150改名为mjpro150,200改名为mujoco210。将其秘钥mjkey.txt放入.mujoco\下,也放入对应环境的bin\目录下。 - 配置相关的环境变量,在
path中添加C:\Users\xxx\.mujoco\mujoco210\bin并移到第一行,注意替换其中的目录为要装的mujoco版本。若安装150版本,还需添加如下两个环境变量:
MUJOCO_PY_MJKEY_PATH=C:\Users\xxx\.mujoco\mjpro150\bin\mjkey.txt MUJOCO_PY_MJPRO_PATH=C:\Users\xxx\.mujoco\mjpro150
- 安装mujoco-py。150版本去github下载1.50.1.0的源码,解压后先进入该项目目录,执行
pip install -r requirements.txt和pip install -r requirements.dev.txt,之后再执行python setup.py install即可。210版本直接执行pip install mujoco-py==2.1.2.14即可安装。
# 测试mojuco_py环境
import mujoco_py
import os
mj_path = mujoco_py.utils.discover_mujoco() # 210
# mj_path, _ = mujoco_py.utils.discover_mujoco() # 150
xml_path = os.path.join(mj_path, 'model', 'humanoid.xml')
model = mujoco_py.load_model_from_path(xml_path)
sim = mujoco_py.MjSim(model)
print(sim.data.qpos)
sim.step()
print(sim.data.qpos)
- 安装multiagent_mujoco。只有210版本才行,同时需保证
mujoco_py>=2.1.2.14才行。去官网克隆源码进行安装。注意: 安装时只要ma_mujoco装上了,其 numpy和scipy版本比setup.py中的要求低了一些也没问题。若发现安装好的包内的assets目录内没有模型,需将源码中的assets目录内的模型全部拷贝过去即可。
# ma_mujoco测试
from multiagent_mujoco.mujoco_multi import MujocoMulti
import numpy as np
import time
def main():
env_args = {"scenario": "manyagent_swimmer",
"agent_conf": "10x2",
"agent_obsk": 1,
"episode_limit": 1000}
env = MujocoMulti(env_args=env_args)
env_info = env.get_env_info()
n_actions = env_info["n_actions"]
n_agents = env_info["n_agents"]
n_episodes = 10
for e in range(n_episodes):
env.reset()
terminated = False
episode_reward = 0
while not terminated:
obs = env.get_obs()
state = env.get_state()
actions = []
for agent_id in range(n_agents):
avail_actions = env.get_avail_agent_actions(agent_id)
avail_actions_ind = np.nonzero(avail_actions)[0]
action = np.random.uniform(-1.0, 1.0, n_actions)
actions.append(action)
reward, terminated, _ = env.step(actions)
episode_reward += reward
time.sleep(0.1)
env.render()
print("Total reward in episode {} = {}".format(e, episode_reward))
env.close()
if __name__ == "__main__":
main()
Ubuntu
MuJoCo-py 对 ubuntu 的支持很好,适用性很强,网上也有很多ubuntu安装的教程,这儿就不重复介绍了。直接放几个实用点的使用的链接:
| 标题: | 强化学习MuJoCo环境安装 |
|---|---|
| 链接: | https://www.fightingok.cn/detail/257 |
| 更新: | 2023-08-11 21:24:46 |
| 版权: | 本文采用 CC BY-NC-SA 3.0 CN 协议进行许可 |